Solutions d'automatisation et robots de pipetage
CyBi®-Well Vario, Pipeteur automatique CyBio apporte puissance et rapidité
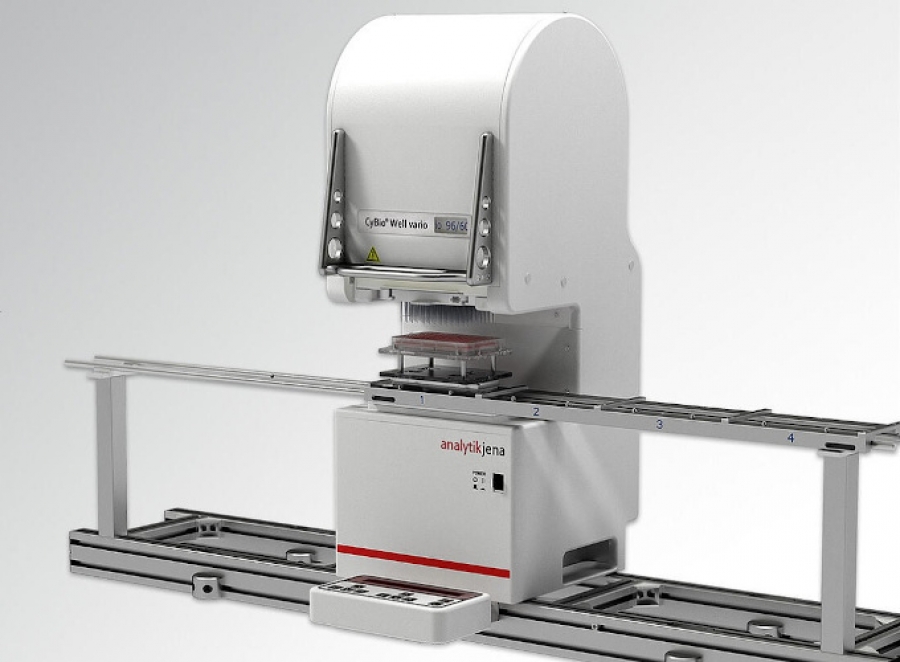
Le CyBi®-Well Vario posséde une base automatisée qui utilise 9 têtes de pipetage interchangeables différentes simultanément. Les têtes peuvent être modifiées de façon simple et rapide à l'avant ou à l'arrière de l'instrument. Après le changement d'une tête de pipetage,…
En Savoir Plus
CyBio-FeliX : Ce nouveau robot de pipetage apporte un niveau de flexibilité incomparable pour sa taille
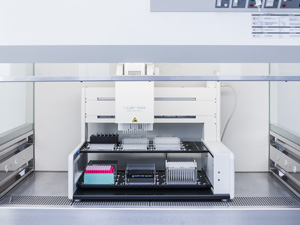
Le CyBi-Felix de CyBio est une plateforme de pipetage flexible et compacte qui permet le pipetage monocanal et multicanaux pour un encombrement de seulement 65x45 cm. Ce pipeteur automatique trouvera facilement sa place dans tout laboratoire et sous toute hotte.…
En Savoir PlusDisplaying items by tag: plateforme robotique
CyBi®-Well Vario, Pipeteur automatique CyBio apporte puissance et rapidité
Le CyBi®-Well Vario posséde une base automatisée qui utilise 9 têtes de pipetage interchangeables différentes simultanément. Les têtes peuvent être modifiées de façon simple et rapide à l'avant ou à l'arrière de l'instrument. Après le changement d'une tête de pipetage, il n'est pas nécessaire de procéder à un nouvel étalonnage. Que ce soit avec -4 , -5 ou 10 positions l'espace de travail vous permet de gérer un large panel de microplaques avec une grande souplesse et une haute précision de pipetage.







Une large gamme de volume est disponible permettant des transferts de liquides allant de 25 nl à 250µl soit avec 96, 384, 1536 pointes jetables. Le CyBi®-Well Vario s'adapte à tous les travaux de screening et est compatible avec l'intégralité des accessoires de la gamme CyBi®-Well. Le logiciel CyBio-Composer® permet une utilisation simple de l'instrument et une détection immédiate d'un changement de tête.
Caractéristiques
|
|
|
CyBio-FeliX : Ce nouveau robot de pipetage apporte un niveau de flexibilité incomparable pour sa taille

Le CyBi-Felix de CyBio est une plateforme de pipetage flexible et compacte qui permet le pipetage monocanal et multicanaux pour un encombrement de seulement 65x45 cm.
Ce pipeteur automatique trouvera facilement sa place dans tout laboratoire et sous toute hotte.
Généralités
Son plateau à 12 positions permet de s’accommoder de réservoirs, microplaques, pointes, tubes et accessoires divers.
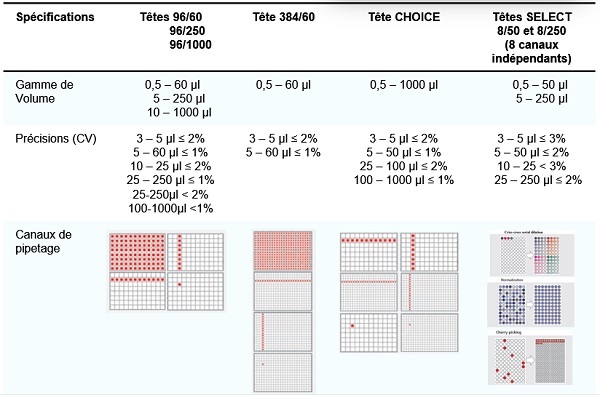
Selon vos méthodes vous avez le choix de 3 têtes de pipetage interchangeables en quelques secondes avec notamment des têtes 96 et 384 pointes.
La tête CHOICE™ unique par exemple vous offre une gamme de volume allant de 500 nl à 1000 μL.
Le CyBi-FeliX basé sur 25 ans d’expérience en pipetage vous permet aussi bien de faire de l’Elisa, du set-up de PCR et séquençage, NGS (Next Generation Sequencing), hit picking, dilution sérielle, colonne ou ligne, dilution, copie etc…
Cette plateforme de pipetage automatique, s’adapte à la plupart de vos besoins et apporte une solution idéale à la plupart des laboratoires travaillant aussi bien avec des tubes, microtubes que des microplaques.











Pointes de pipetage pour CyBi-Felix

Le CyBi-Felix de CyBio est une plateforme de pipetage flexible et compacte qui permet le pipetage monocanal et multicanaux pour un encombrement de seulement 65x45 cm.
Ce pipeteur automatique trouvera facilement sa place dans tout laboratoire et sous toute hotte.
Pour Tête de pipetage CyBi-Felix R 384/60µL
En utilisant les CyBi-RoboTipTrays pour pipetage en format 384 pointes.
En utilisant les adaptateurs pour mono-pipetage, pipetage en lige, pipetage en colonne.
384* = Les CyBi-Tips Box pour format 384 puits sont conditionnés en boites de 192 Pointes pour pipetage en mono pointe ou en colonne.




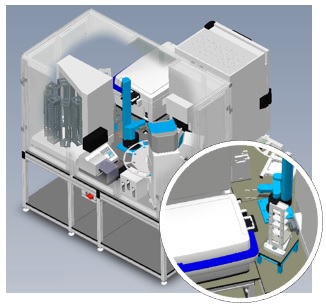
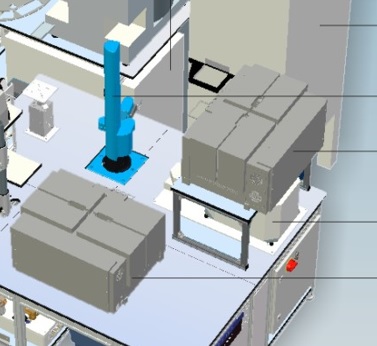
Plateformes robotiques pour compound management
Afin d'accompagner les utilisateurs de différentes plateformes robotiques de High Throughput Screening (screening à haut-débit), l'utilisation de plateforme de gestion de composés dédiée apporte la flexibilité, la robustesse et le débit nécessaires pour cette logistique.
Que ce soit pour délivrer des microplaques assay-ready ou pour ses propres criblages, nous gérons aussi bien les microplaques au format 96, 384, 1536 puits que des microtubes. De nombreux modes de pipetage ou de distributions sont disponibles pour manipuler de 20 nL à 1000 µL.
Exemples d'intégration |
|
Petite plateforme robotique de compound management |
|
|
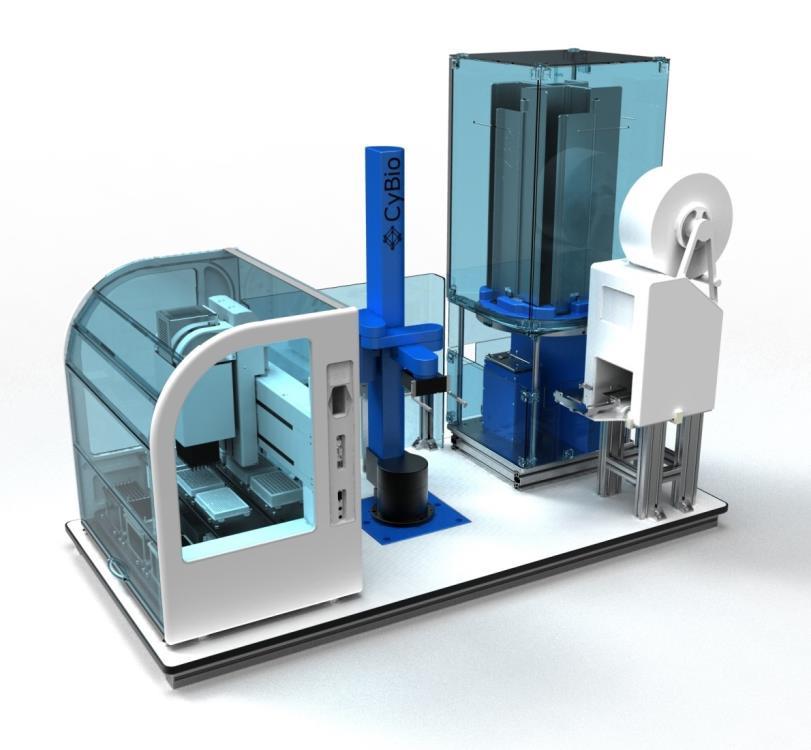 |
Plateforme robotique de µcompound management |
|
|
 |
| Ces exemples de plateforme robotique ne sont pas exhaustifs... nous consulter ! | |



Découvrez également:
![]() Notre logiciel Scheduler
Notre logiciel Scheduler
![]() Une liste non exhaustives des différents pluggin disponibles
Une liste non exhaustives des différents pluggin disponibles
![]() Les différents choix de bras de manipulation 3 axes, 4 axes, 6 axes.
Les différents choix de bras de manipulation 3 axes, 4 axes, 6 axes.
Documentations | Vidéos | Images
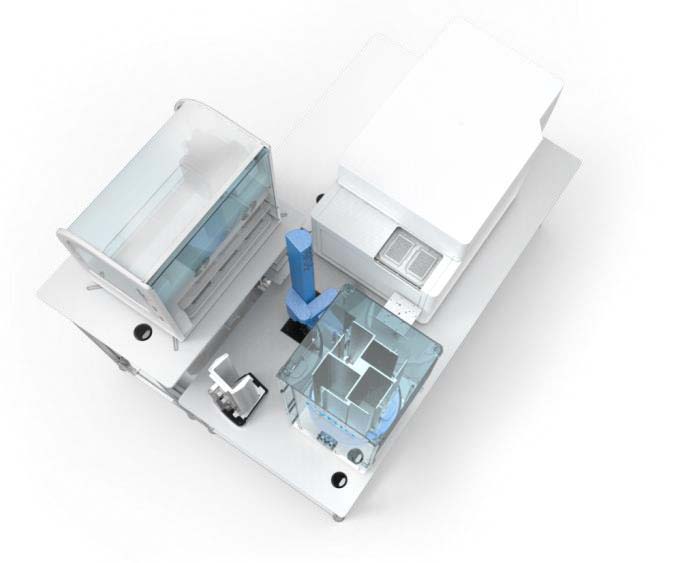
Plateformes robotiques pour criblage en High-Throughput Screening HTS
Présent depuis plus de 25 ans dans les laboratoires de High-Throughput Screening (HTS), nous offrons un large panel de configurations pour le criblage de composés pharmaceutiques ou viraux.
Que vous souhaitiez réaliser des tests sur des molécules bioactives ou bien des tests d’interactions à travers des essais enzymatiques in vitro ou cellulaires (essais de liaison, HTRF, essais enzymatiques, libération de facteurs solubles, toxicité, …), nous réalisons une étude personnalisée sur demande.
Exemples d'intégration |
|
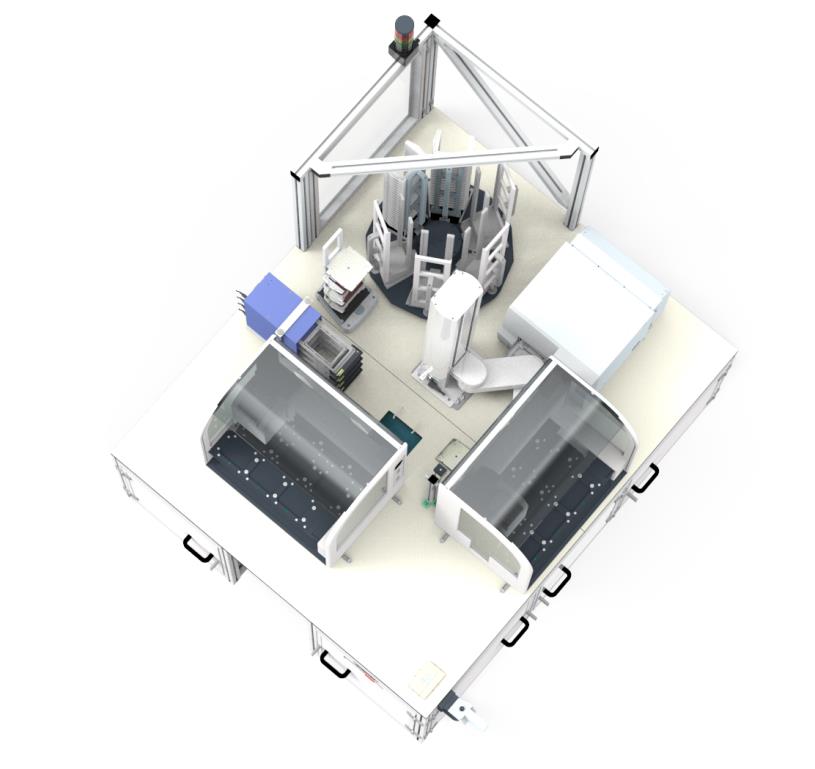
Petite plateforme robotique de screening à haut débit (HTS) pour HTRF |
|
|
 |
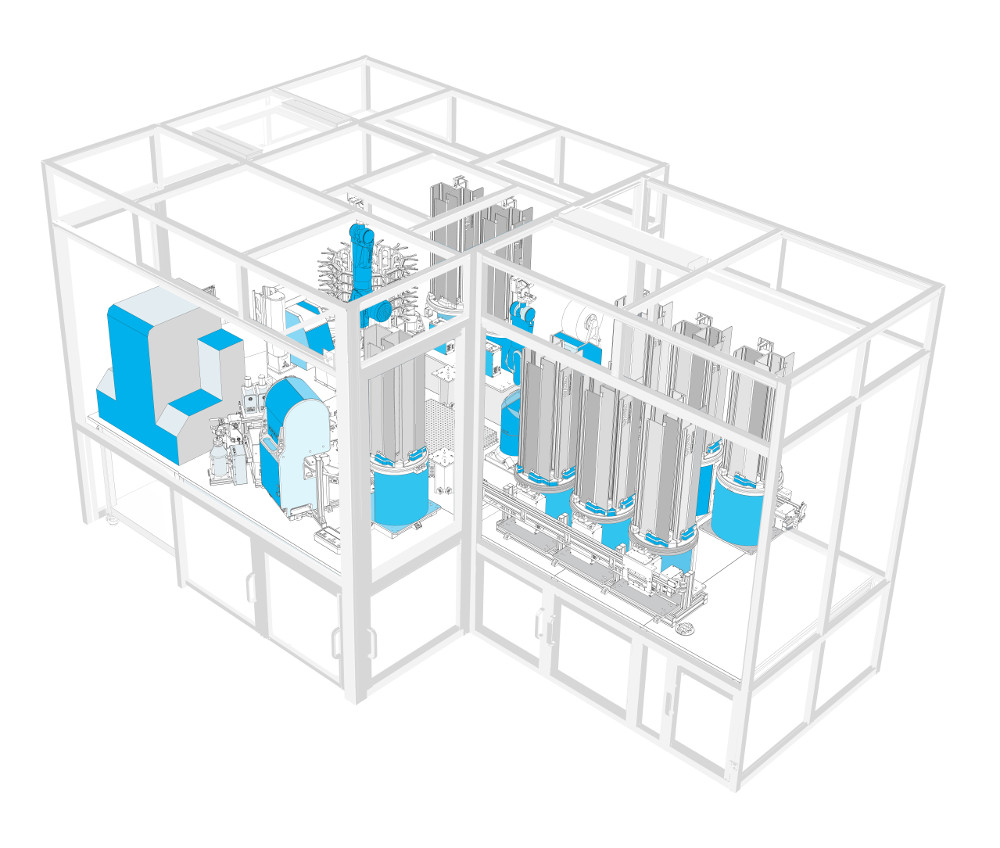
Plateforme robotique de HTS |
|
|
 |
| Ces exemples de plateforme robotique ne sont pas exhaustifs... nous consulter ! | |
Découvrez également:
![]() Notre logiciel Scheduler
Notre logiciel Scheduler
![]() Une liste non exhaustives des différents pluggin disponibles
Une liste non exhaustives des différents pluggin disponibles
![]() Les différents choix de bras de manipulation 3 axes, 4 axes, 6 axes.
Les différents choix de bras de manipulation 3 axes, 4 axes, 6 axes.
Documentations | Vidéos | Images
Plateformes robotiques pour la biologie de synthèse
La mise en oeuvre de l'ingénierie métabolique implique une grande variété de combinaisons que seule une approche automatisée permet de réaliser de manière fiable et rapide.
Que vous souhaitiez modifier le genome de microorganismes et traiter des milliers de modifications génétiques ou bien caractériser vos constructions génétiques, différentes solutions s'offrent à vous pour mener à bien vos projets de biologie de synthèse.
Exemples d'intégration |
|
Plateforme robotique pour caractérisation de biologie de synthèse |
|
|
 |
Plateforme robotique pour assemblage d'ADN en biologie de synthèse |
|
|
 |
Plateforme robotique d'assemblage genomique en biologie de synthèse |
|
|
 |
| Ces exemples ne sont pas exhaustifs... nous consulter ! | |
Découvrez également:
![]() Notre logiciel Scheduler
Notre logiciel Scheduler
![]() Une liste non exhaustives des différents pluggin disponibles
Une liste non exhaustives des différents pluggin disponibles
![]() Les différents choix de bras de manipulation 3 axes, 4 axes, 6 axes.
Les différents choix de bras de manipulation 3 axes, 4 axes, 6 axes.
Documentations | Vidéos | Images
Bras robotiques pour plateformes robotiques
Différents choix de bras robotiques sont disponibles pour l'automatisation de plateforme robotique.
Nos solutions de logiciel permettent l'intégration d'un à plusieurs bras sur une même plateforme.
Les solutions proposées seront fonction des méthodes à faire exécuter, du nombre de périphériques à connecter et des contraintes de la pièce qui accueillera la solution.
Exemples de bras robotiques |
|
Automatisation bras robotique Staubli TX40 ou TX 60 |
|
|
 |
Automatisation bras robotique Paa Automation KiNEDx™ ou GX™ |
|
|
 |
Automatisation bras robotique Precise Automation PF750 |
|
|
 |
Automatisation bras robotique CyBi-Carry |
|
|
 |
| Ces exemples ne sont pas exhaustifs... nous consulter ! | |







Découvrez également:
![]() Notre logiciel Scheduler
Notre logiciel Scheduler
![]() Une liste non exhaustives des différents pluggin disponibles
Une liste non exhaustives des différents pluggin disponibles
![]() Les différents plateformes robotiques pour criblage en HCS
Les différents plateformes robotiques pour criblage en HCS
Documentations | Vidéos | Images
Plateformes robotiques pour criblage en HCS
La mise en oeuvre de High Content Screening (HCS) ou High-Content Analysis (HCA) permet à travers l'automatisation , d'accélerer le débit de mesure sur ce type de lecteurs.
L'approche automatisée dans l'utilisation de lecteur de HCS ou HCA nécessite la prise en compte de nombreux facteurs car la manipulation de cellules vivantes doit conduire à des résultats reproductibles pour être exploitables.
Ceci constitue une approche relativement nouvelle et cependant nous avons déjà réalisé plusieurs intégrations avec ce type de technologie combinée à une problématique de haut débit.
Exemples d'intégration |
|
Automatisation du lecteur HCS de microplaques Yokogawa CV7000 |
|
|
 |
Automatisation du lecteur HCS de microplaques Perkin-Elmer Operetta |
|
|
 |
Automatisation du lecteur HCS de microplaques Acumen de TTP Labtech |
|
|
 |
Automatisation du lecteur HCS de microplaques In Cell Analyzer 2000 de General Electric |
|
|
 |
| Ces exemples ne sont pas exhaustifs... nous consulter ! | |
Découvrez également:
![]() Notre logiciel Scheduler
Notre logiciel Scheduler
![]() Une liste non exhaustives des différents pluggin disponibles
Une liste non exhaustives des différents pluggin disponibles
![]() Les différents choix de bras de manipulation 3 axes, 4 axes, 6 axes.
Les différents choix de bras de manipulation 3 axes, 4 axes, 6 axes.
Documentations | Vidéos | Images
Incubateur LiCONiC STT3K0-Kiwi

L'incubateur STT3K0-Kiwi conçu pour durer est le matériel le plus robuste sur le marché. LiCONiC propose avec ce produit une solution maximisant la capacité de stockage, le tri des tubes et la récupération des échantillons en un appareil unique. L'incubateur STT3K0 utilise une interface de lots permettant le transfert des lots de racks.
Le développement de logiciel simple d'utilisation est une compétence clé de notre partenaire LiCONiC. L'évolution des logiciels de gestion des échantillons LiCONiC permet d'offrir pour ce produit une interface utilisateur aussi simple à utiliser qu'un distributeur. Toutes les actions effectuées seront sauvegardées permettant une traçabilité sans faille.
Le STT3K0-Kiwi est une solution idéale et autonome pour le stockage et la récupération d'échantillons. Son unité de transfert pour microplaques au format standard SBS peut être utilisée afin d'intégrer n'importe quel système robotisé.
Caractéristiques
 |
|
QuadPrint, Imprimante automatique de code barres CyBio
L'imprimante de code à barres pour microplaques est le compagnon idéal pour toute mise en place de traçabilité des microplaques au sein d'un laboratoire.
Son interface logiciel permet de créer simplement des éléments fixes (dates/ nom du labo etc...) et des éléments variables (N° de lot, N° série etc...).
L'un et l'autre pouvant être imprimé en format alphanumérique ou code barre.
La plupart des formats de code barres sont supportés (nous contacter).
L'opérateur défini sa série de code à générer. Ensuite, l'opérateur ou un bras robotique alimente l'imprimante afin qu'elle génére et applique automatiquement les étiquettes de code à barres (1 à 4 par plaques).
L'imprimante est capable de détecter la présence de chaque microplaque et implémente la série prédéfinie ou récupérée à partir d'une liste de travail.
En cas d'absence de microplaques ou d'étiquettes, l'imprimante se met en attente.
Un lecteur de code barre en option permet la vérification au fil de l'eau les code barres imprimés.





Caractéristiques
|
|
|
|
